

第一章 单元测试
1、单选题:
被誉为现代工业机器人之父的是( )。
选项:
A:加藤一郎
B:阿西莫夫
C:维纳
D:德沃尔
答案: 【德沃尔】
2、单选题:
被誉为仿人机器人之父的是( )。
选项:
A:阿西莫夫
B:德沃尔
C:维纳
D:加藤一郎
答案: 【加藤一郎】
3、单选题:
机器人robot一词最早出现于下面哪部作品( )。
选项:
A:《未来夏娃》
B:《罗萨姆的机器人万能公司》
C:《控制论》
D:《信息论》
答案: 【《罗萨姆的机器人万能公司》】
4、判断题:
当一个机器人的关节只具有张开或者加紧的动作时,可认为该关节具有0.5个自由度。( )
选项:
A:对
B:错
答案: 【对】
5、单选题:
人体具有五大组成部分,分别是五官、心脏、脑、骨骼、四肢,与之对应,机器人也应该具有五大组成部分,按顺序依次是( )。
选项:
A:控制系统、检测装置、机械本体、驱动器、执行机构
B:驱动器、控制系统、检测装置、机械本体、执行机构
C:检测装置、驱动器、控制系统、机械本体、执行机构
D:机械本体、驱动器、控制系统、检测装置、执行机构
答案: 【检测装置、驱动器、控制系统、机械本体、执行机构】
第二章 单元测试
1、单选题:
一矢量![图片[1]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/a5f5d8905abe4742aa2fa609ca2a42a6.png) 绕
绕![图片[1]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/1fe187807fb54d0982f4006dab0be524.png) 旋转
旋转![图片[1]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/47f78d434aad4c3a8490ea762fd13b8b.png) 度,然后绕
度,然后绕![图片[1]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/2ab4c0a68b8e4b72b2df42c38f8270f3.png) 旋转
旋转![图片[1]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/dbb8230a02b24739b8a9ab5fbdccd990.png) 度,求按上述顺序旋转后得到的旋转矩阵为( )。
度,求按上述顺序旋转后得到的旋转矩阵为( )。
选项:
A:
B:
C:
D:
答案: 【
】
2、单选题:
一矢量![图片[3]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/5dc847aaf75f4689b507bca3e60fde7d.png) 绕
绕![图片[3]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/9629a33d2caa4e6ea5d189cb0b9ad657.png) 旋转30度,然后绕
旋转30度,然后绕![图片[3]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/788e379ece2846b887894d14f54ec415.png) 旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。
旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。
选项:
A: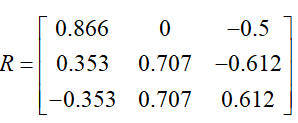
B:
C:
D:
答案: 【
】
3、单选题:
坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/696496dbf0604e79b5f9955d353f5497.png) 旋转
旋转![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/a3ed47bcf2ef4fd7af4424df8dc01079.png) 度,接着再将上一步旋转得到的坐标系绕
度,接着再将上一步旋转得到的坐标系绕![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/7ced0f73df104eb89ab3590003d923ed.png) 旋转
旋转![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/72c70e06b1314f79bac756bc99514ccf.png) 度,求从
度,求从![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/d9bb7ff5f4d14291b4d730c7b1b4c4a3.png) 到
到![图片[5]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/a3ef3978a99542d7a282aae5aef4d323.png) 矢量变换的旋转矩阵为( )。
矢量变换的旋转矩阵为( )。
选项:
A:
B:
C:
D:
答案: 【
】
4、单选题:
坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕![图片[7]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/be3381ff277c4955b8f1ea39c40acf27.png) 旋转30度,接着再将上一步旋转得到的坐标系绕
旋转30度,接着再将上一步旋转得到的坐标系绕![图片[7]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/a671792255194b14be0bab7aaf10f1df.png) 旋转45度,求从
旋转45度,求从![图片[7]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/9d748f8a645e4ccd83c69b73a3c9c3bd.png) 到
到![图片[7]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/2c6149be504b4ea4a3836c4f384771a4.png) 矢量变换的旋转矩阵( )。
矢量变换的旋转矩阵( )。
选项:
A:
B: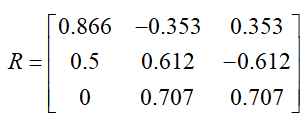
C: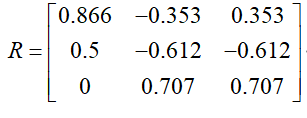
D: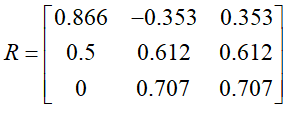
答案: 【
】
5、单选题:
两个有限旋转矩阵可以交换的条件是( )。
选项:
A:当这两个旋转的旋转角度小于等于90°时
B:当这两个旋转是绕着同一个坐标轴转动时
C:任何条件下都不可交换
D:当这两个旋转所绕的坐标轴是互相正交时
答案: 【当这两个旋转是绕着同一个坐标轴转动时】
6、单选题:
已知一速度矢量为![图片[9]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/06377f63f4f34a3ba003190a59a7b10f.png) ,又已知
,又已知![图片[9]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/ba8bd0b65e9e46c1b5d01b6c09f19ed3.png) ,下列计算
,下列计算![图片[9]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/0d20248d1b81422ba4e281bcd429e7b1.png) 不正确的是( )。
不正确的是( )。
选项:
A: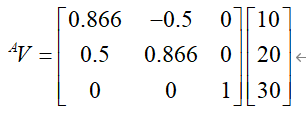
B:
C:
D:
答案: 【
】
7、单选题:
关于旋转矩阵和齐次矩阵,下列不正确的是( )。
选项:
A:旋转矩阵的逆矩阵等于该矩阵的转置
B:齐次矩阵的行列式可能不等于1
C:旋转矩阵的行列式可能不等于1
D:齐次矩阵的逆矩阵等于该矩阵的转置
答案: 【旋转矩阵的行列式可能不等于1】
8、单选题:
关于齐次矩阵![图片[11]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/a3901350cbe34850b982cefc54014c20.png) ,下列表述不正确的是( )。
,下列表述不正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
】
9、单选题:
已知坐标系{B}相对于坐标系{A}的齐次变换阵。已知![图片[13]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/08c014b3447049e2af4174033e0cae63.png) ,求
,求![图片[13]-2026知到答案 工业机器人(哈尔滨工程大学) 最新智慧树满分章节测试答案-极客兴星球](https://image.zhihuishu.com/zhs/doctrans/docx2html/202102/1511b23071dc49748441a982720d77fd.png) ,下列说法正确的是( )。
,下列说法正确的是( )。
选项:
A:
B:
C:
D:
答案: 【
】
10、单选题:
圆柱坐标系的三个坐标参数定义见下图,坐标 给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点
给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点 结果正确的是( )。
结果正确的是( )。

选项:
A:

B:

C:

D:

答案: 【
】




暂无评论内容